
ROS
ROS
参考资料
roslaunch/XML/rosparam - ROS Wiki
4.2.6 launch文件标签之rosparam · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
group
1 | <launch> |
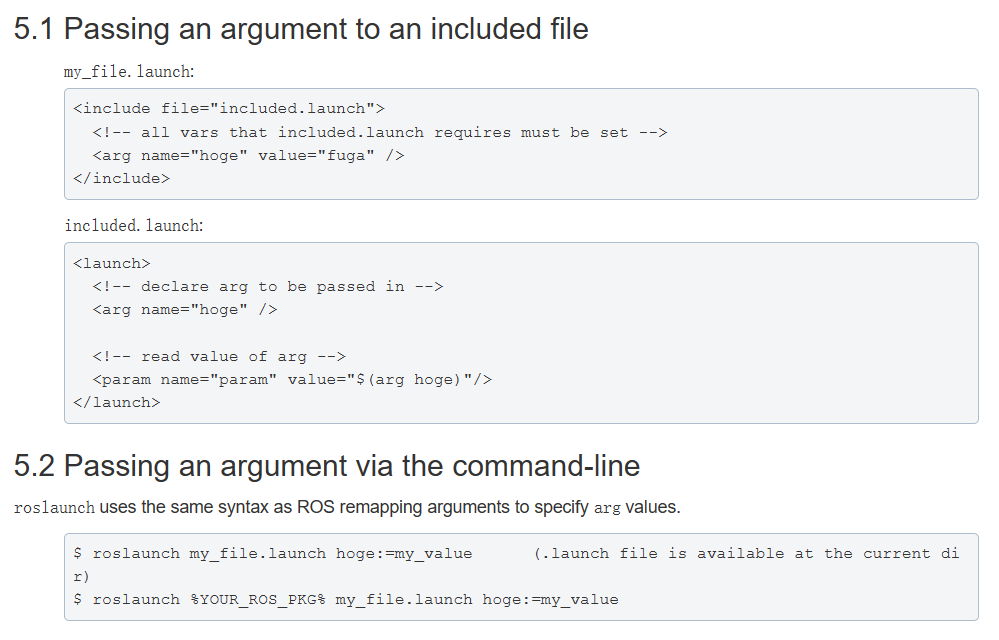
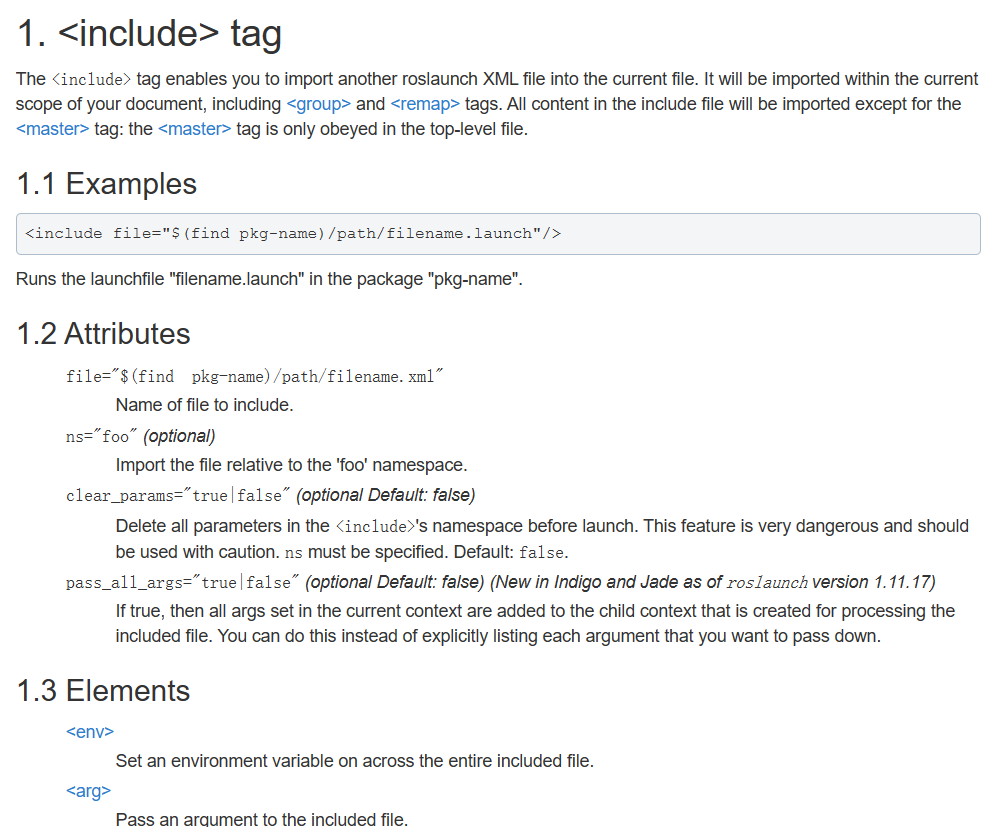
arg

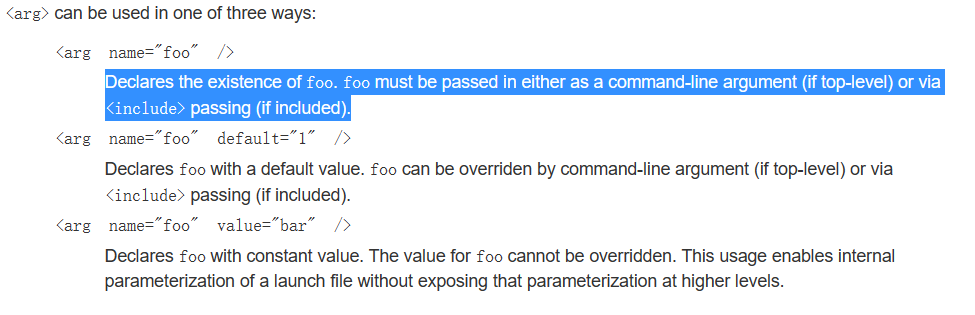
可以通过 include 以及 命令行 传递参数
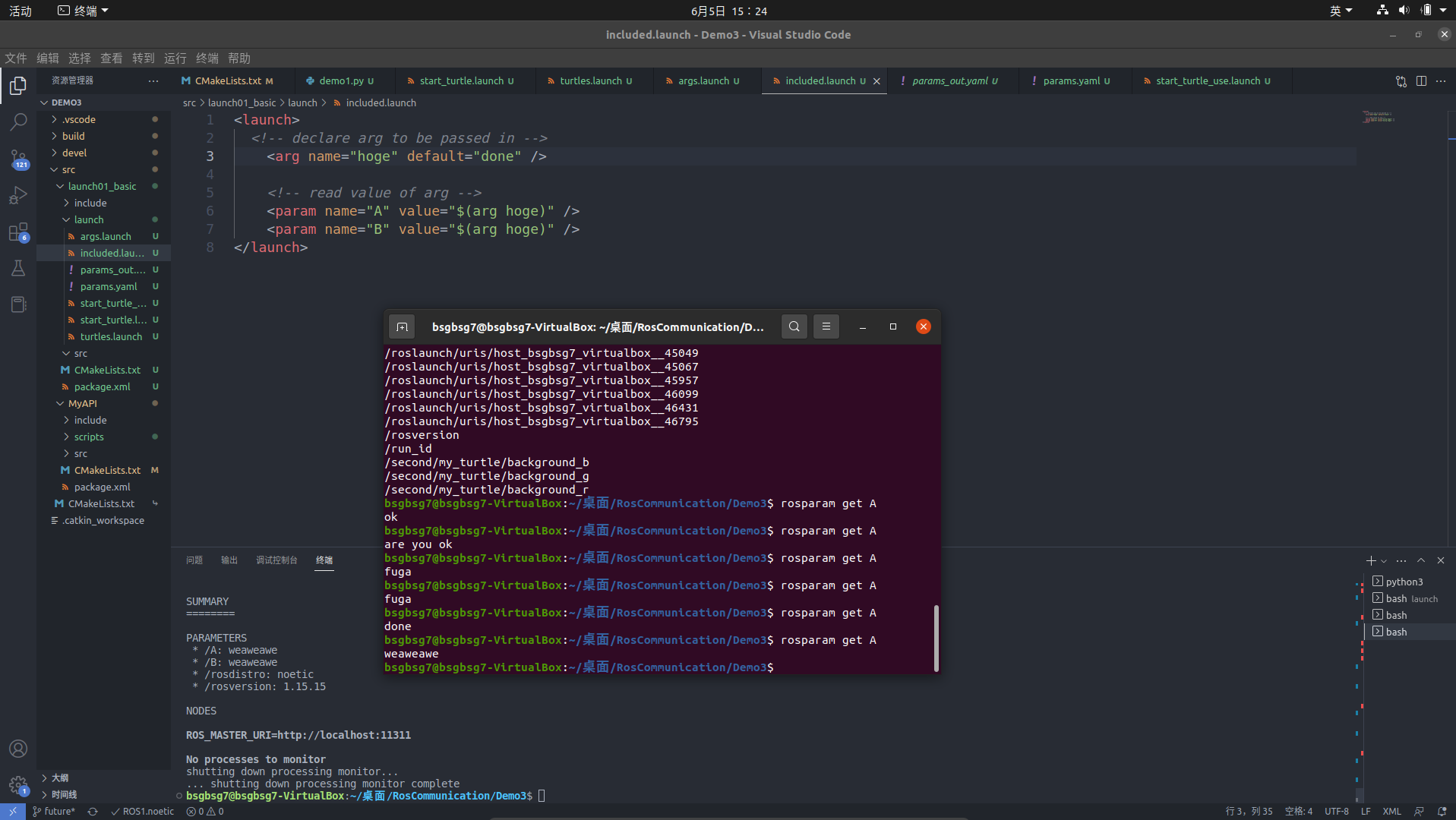
先运行 included.launch 可以看到是默认值 “done”,再运行 args.launch,可以看到参数 “weaweawe” 传递给了 A 和 B
Timer
(56条消息) ros timer(定时器)_九柳的博客-CSDN博客

1 | timer_ = nh_private.createTimer(ros::Duration(1.0/max(freq,1.0)),&OdomEstimationNode::spin, this); |
&OdomEstimationNode::spin 获取对象的函数指针,调用入口,this指针说明这是哪个对象
因为cpp类中所有成员共享全部函数,所以入口只有一个,通过类名::函数名获取,区分对象用this指针(构造器中构造时使用),或者对象名
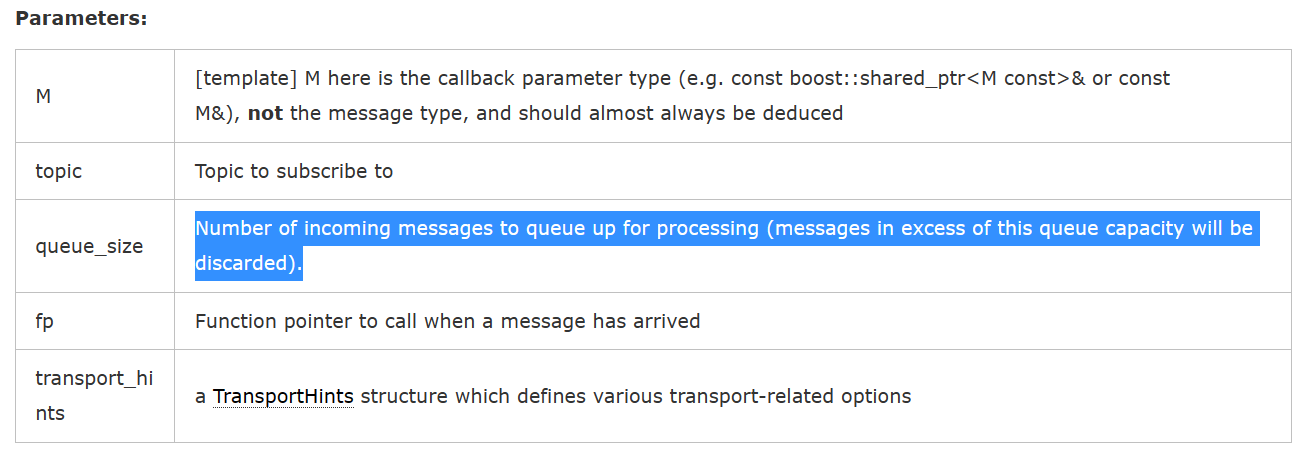
subscribe函数用于订阅topic并添加回调函数
1 | cloud_subs_= nh_.subscribe<sensor_msgs::PointCloud2>("segmentation_result", 1,&RecognitionClass::cloudCallBack, this); |
PointCloud2为订阅的消息类型"segmentation_result"为topic名,之后会重映射为真实的名称1为处理队列大小&RecognitionClass::cloudCallBack是回调函数地址this为回调函数所处的类,即当前类
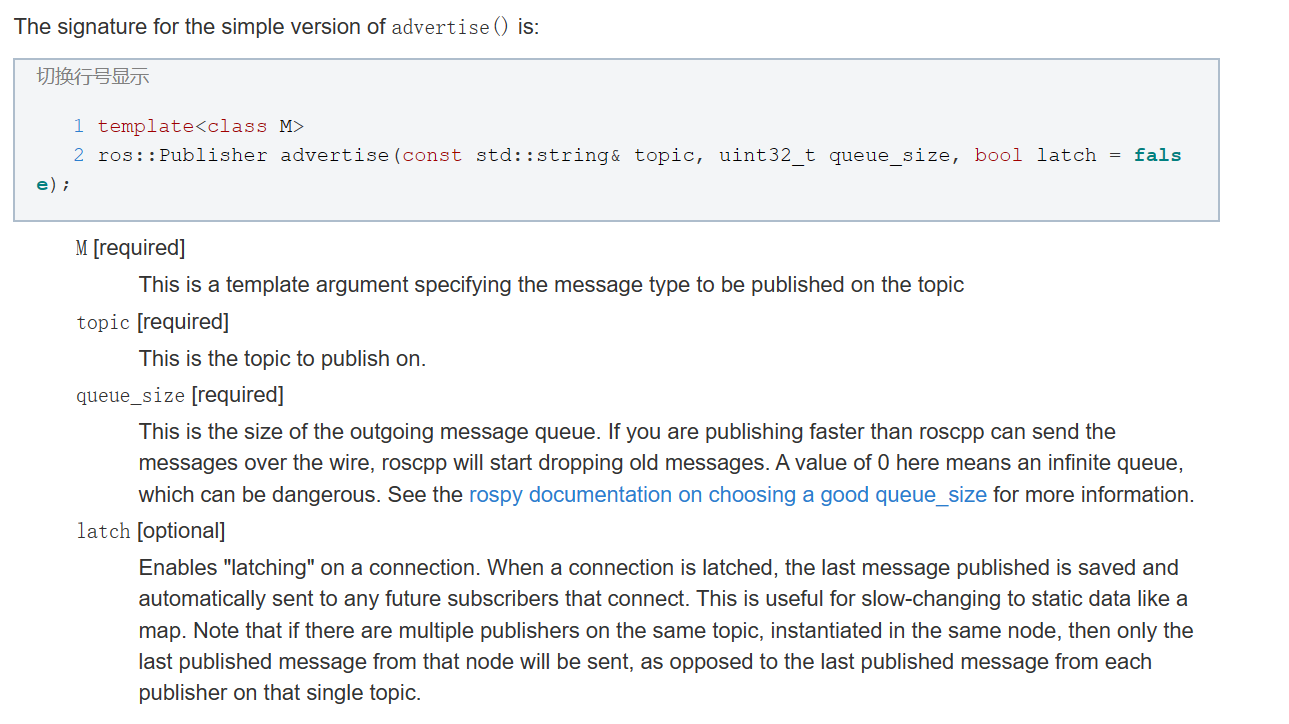
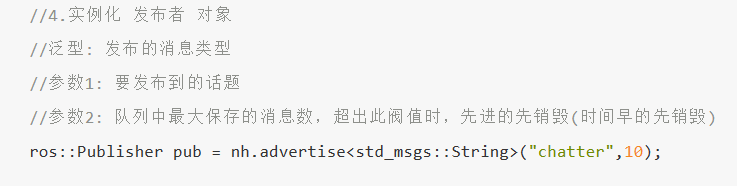
advertise
就是正常的发布话题
[roscpp/Overview/Publishers and Subscribers - ROS Wiki](https://wiki.ros.org/roscpp/Overview/Publishers and Subscribers)
(58条消息) 在ros中函数advertise()的作用_n.advertise_@晓凡的博客-CSDN博客
(58条消息) ROS 之 advertise 详解_ros中advertise_Dr. Qing的博客-CSDN博客
push_back 函数
函数将一个新的元素加到vector的最后面,位置为当前最后一个元素的下一个元素
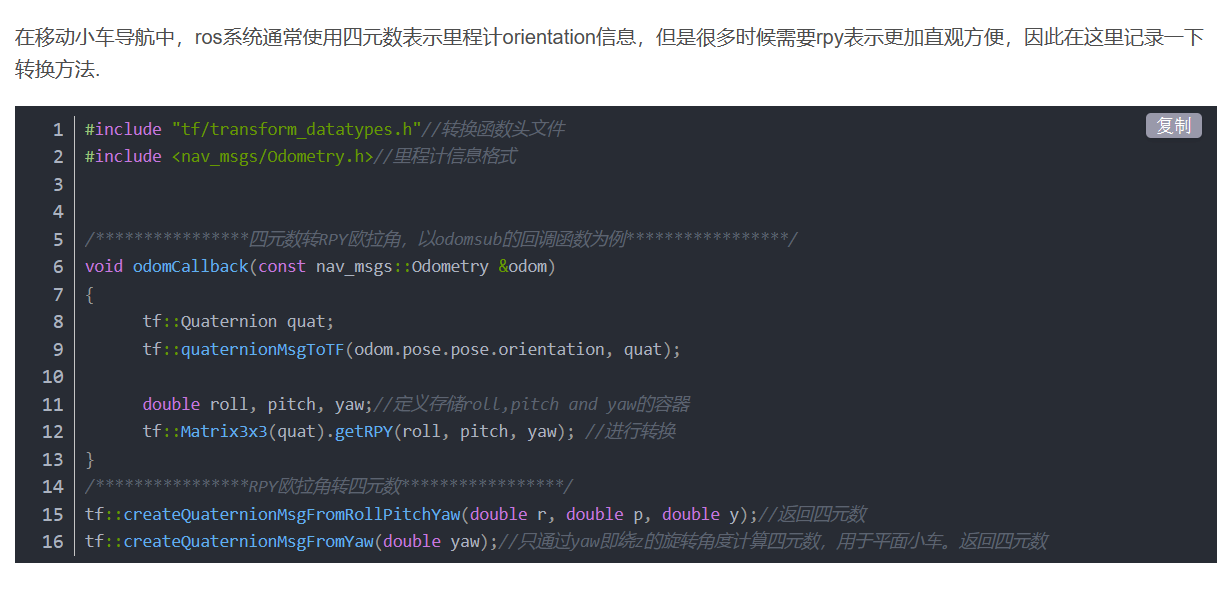
Quaternion 四元数
[tf2/Tutorials/Quaternions - ROS Wiki](http://wiki.ros.org/tf2/Tutorials/Quaternions#:~:text=ROS uses quaternions to track and apply rotations.,like Eigen put w as the first number!).)
(57条消息) ROS 四元数和RPY欧拉角转换_c++四元数转欧拉角_ZiTian_Shi的博客-CSDN博客
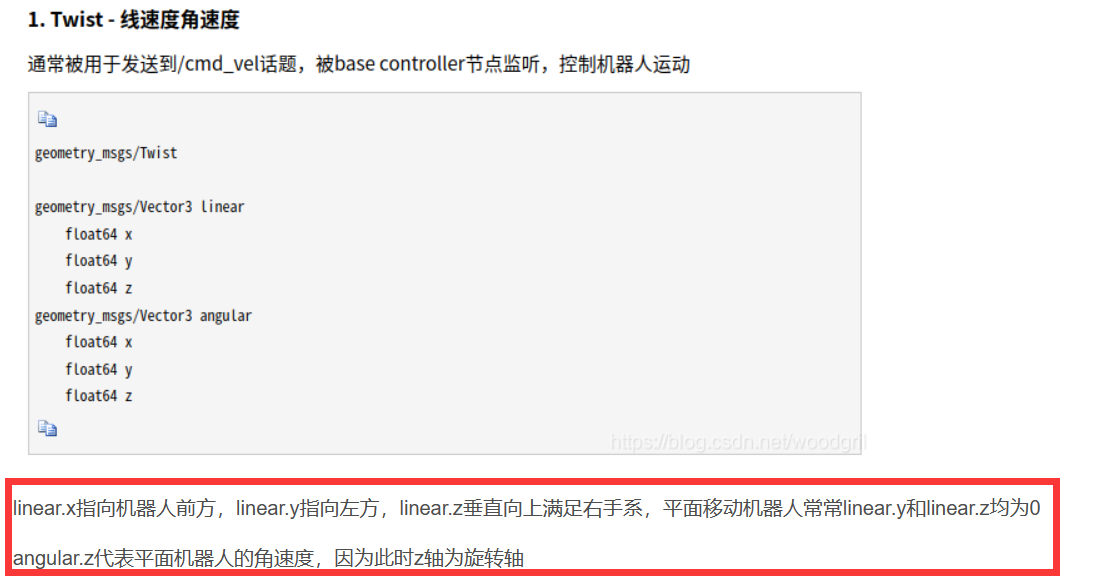
cmd_vel
src文件内多个main函数编译报错
单独添加
1 | add_excutable; |
雷达数据处理
(58条消息) ROS中激光雷达数据类型传递转换及自定义点云数据类型介绍_ros 自定义雷达消息_四海五湖百夜月的博客-CSDN博客
(58条消息) ROS小车——雷达的使用与SLAM建图(4)_robot_navigation_running snail szj的博客-CSDN博客
(58条消息) ros中激光雷达的消息类型(sensor_msgs/LaserScan Message)说明_ultimate1212的博客-CSDN博客
sensor_msgs/LaserScan Documentation (ros.org)
1.3.2 HelloWorld实现A(C++) · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
ros下python文件的使用
ROS/Tutorials/WritingPublisherSubscriber(python) - ROS Wiki
1.3.3 HelloWorld实现B(Python) · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
(58条消息) ROS使用Python编写的步骤_ros编译python文件_Believe yourself!!!的博客-CSDN博客
雷达滤波
(58条消息) 九、ROS小车闭环控制:使用laser_filters在ROS内对二维(2D)激光雷达数据进行基本滤波_orcasdli的博客-CSDN博客
(58条消息) ROS简单实现订阅/scan激光雷达的距离信息_ros scan_多年以后ls的博客-CSDN博客
| void Transformer::transformPose | ( | const std::string & | target_frame, |
|---|---|---|---|
| const ros::Time & | target_time, | ||
| const Stamped< tf::Pose > & | stamped_in, | ||
| const std::string & | fixed_frame, | ||
| Stamped< tf::Pose > & | stamped_out | ||
| ) | const |
Transform a Stamped Pose into the target frame This can throw anything a lookupTransform can throw as well as tf::InvalidArgument.
Definition at line 558 of file tf.cpp.
geometry_msgs/Pose Documentation (ros.org)
# This contains the position of a point in free space
float64 x
float64 y
float64 z
Cmakelist
(70条消息) CMake系列讲解(入门篇)1.4 基础命令CMake-add_executable()_cmake add_ex_在下马农的博客-CSDN博客
1 | add_executable(<name> [WIN32] [MACOSX_BUNDLE] |
添加一个可执行文件目标,此目标:
- 由source列出的文件构建而来
- 名字为name

关闭小车后停止运行
ros在关闭节点后发布消息 - 简书 (jianshu.com)
进程
 wechat
wechat